

运用Arduino的手势操控机器人
运用Arduino的手势操控机器人
时间: 2024-03-01 16:42:35 | 作者: 半岛官网入口
机器人是一个由计算机程序操作的电子机械系统。机器人能是自主的或半自主的。自主的机器人不受人类的操
详细介绍
机器人是一个由计算机程序操作的电子机械系统。机器人能是自主的或半自主的。自主的机器人不受人类的操控,经过对环境的感知来决议自己的行为。
大多数工业机器人是自主的,由于它们需求以高速和高精确度做相关操作。但有些运用需求半自主或人类操控的机器人。
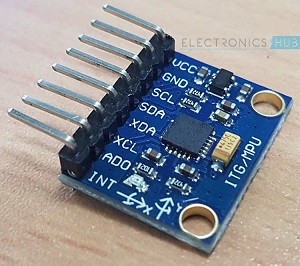
常常完成的运动操控机器人之一是手势操控的机器人。在这一个项目中,运用MPU6050开发了一个手势操控机器人,它是一个三轴加速器和三轴陀螺仪传感器,操控器部分是ArduinoNano。
该项目依据无线通讯,手势的数据经过射频链接(射频发射器-接纳器对)传输给机器人。
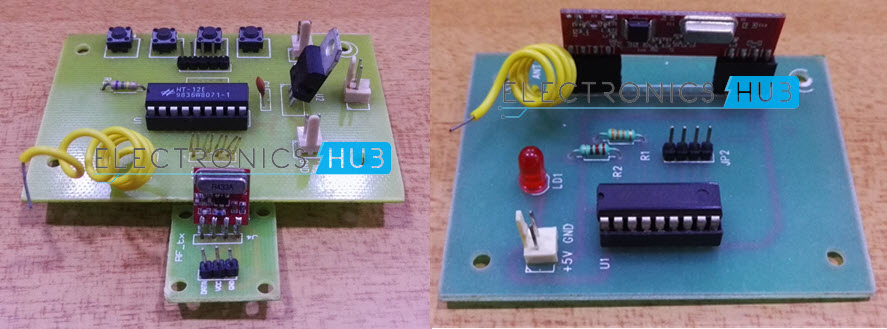
该项目分为发射器和接纳器部分。发送器和接纳器部分的电路图和元件将别离解说。
榜首部分是经过Arduino从MPU6050加速器陀螺仪传感器获取数据。Arduino不断从MPU6050获取数据,并依据预订的参数,将数据发送到射频发射器。
项目的第二部分是射频发射器和射频接纳器之间的无线通讯。射频发射器在收到Arduino的数据后(经过编码器IC),经过射频通讯将其传送给射频接纳器。
最终,项目的第三部分是对射频接纳器收到的数据来进行解码,并将恰当的信号发送至电机驱动IC,然后激活机器人的车轮电机。
MPU6050是爱好者和发烧友最常运用的传感器模块之一。它由加速器和陀螺仪组成,并供给6个自由度(3轴加速器和3轴陀螺仪)。
发射器和接纳器之间的通讯是运用射频模块。在这一个项目中运用了一对434MHz的发射器和接纳器。
它是一个编码器集成电路,将4位并行数据转换为串行数据,以便经过射频链路进行传输。
它是一个解码器IC,将射频接纳器接纳到的串行数据转换成4位并行数据。这个并行数据可拿来驱动电机。
此外,咱们将运用MPU6050的中止引脚,因而,它被衔接到Arduino Nano的D2。
HT-12E是一个编码器集成电路,一般与射频发射器模块有关。它将12位并行数据转换为串行数据。12位数据被分为地址和数据位。A0到A7(针脚1到针脚8)是地址位,它们用于数据的安全传输。这些引脚能坚持敞开或衔接到地(Vss)。在这个电路中,HT-12E的第1至第9针(A0 - A7和Vss)衔接到地。
TE是传输使能引脚,它是一个低电平有用引脚。只需TE为低电平,数据就会被传输。因而,第14针(TE)也被衔接到地。
编码器IC在16和15号引脚(OSC1和OSC2)之间有一个内部振荡器电路。在这些引脚之间衔接了一个750KΩ的电阻来启用振荡器。Dout(针脚17)是串行数据输出针脚。它与射频发射器的数据输入引脚相连。

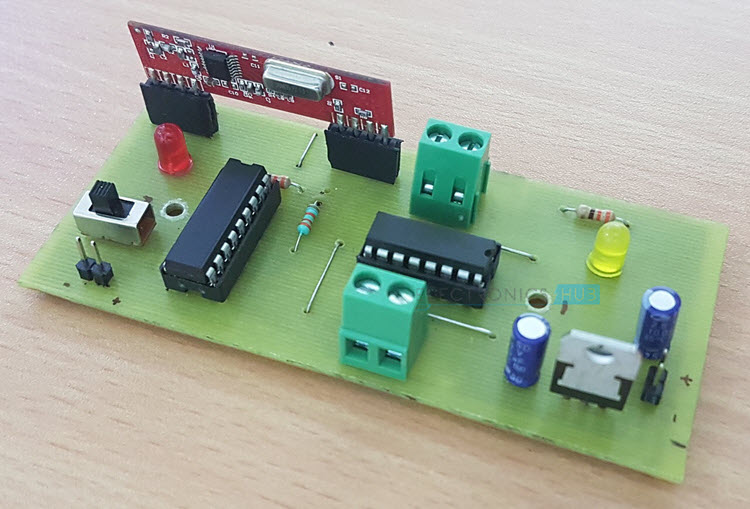
机器人的接纳部分包含一个射频接纳器、HT-12D解码器、L293D电机驱动器和一个带有四个轮子的电机的机器人底盘。
HT-12D是一般与射频接纳器相关的解码器IC。它将射频链路收到的串行数据转换为并行数据。A0到A7(针脚1到针脚8)是地址针脚,有必要与编码器的地址针脚匹配。
由于编码器(HT-12E)的地址引脚是接地的,所以解码器的地址引脚也有必要接地。因而,1-9号针脚(A0-A7和Vss)要接地。来自射频接纳器的串行数据被赋予解码器IC的Din(针脚14)。
HT-12D有一个内部振荡器,在OSC1和OSC2(16和15脚)之间衔接一个33KΩ的外部电阻。17脚(VT)表明数据的有用传输,当数据引脚上呈现有用数据时,该脚将为高电平。一个与330Ω电阻串联的LED被衔接到这个引脚,以指示有用的数据传输。
HT-12D的10至13脚(D8、D9、D10和D11)是并行数据输出脚。它们被衔接到L293D电机驱动IC的输入引脚(别离为2、7、10和15脚)。
L293D电机驱动芯片用于为电机供给必要的电流(用于正反方向)。引脚1和9是使能引脚,与引脚16(这是逻辑电源)一同衔接到VCC(+5v)。引脚3-6和11-14是输出,与四个电机相连。
第8针是电机电源针,衔接到一个独自的电源。因而,在接纳器部分你需求两个电池;一个用于电路,一个用于电机。
在这个项目中,咱们规划了一个由手势操控的移动机器人。这儿解说一下该机器人的作业。
如前所述,手势操控机器人是一种无线操作的机器人,有两个部分: 发射器和接纳器。当机器人通电后,由Arduino、MPU6050、编码器和射频发射器组成的发射器部分将继续监测MPU6050传感器。
这一些数据被Arduino捕获,然后依据MPU6050传感器的方向,将相应的数据传送给编码器。编码器收到的并行数据被转换为串行数据,该串行数据由射频发射器传输。
在接纳部分,射频接纳器接纳串行数据并将其传送给解码器IC。解码器将串行数据转换为并行数据,并将此并行数据供给给电机驱动IC。依据这些数据,电机的运动,以及机器人的运动被界说。
到目前为止,你现已知道了手势操控机器人,它彻底依据你的手的时间(对设备的输入标志)来移动。假如你正在寻觅一个相似的低预算设备,那么机器人吸尘器最适合你,由于它有更大的功能来清洁你的家。
- 上一篇:高档驾驭辅佐体系解决方案系列介绍—数字摄像头
- 下一篇:十大国产GPU产品及规格概述
返回


 电话:
电话: 手机:
手机: 邮箱:
邮箱: 地 址:
地 址: